Cho hệ thống có sơ đồ dòng tín hiệu sau
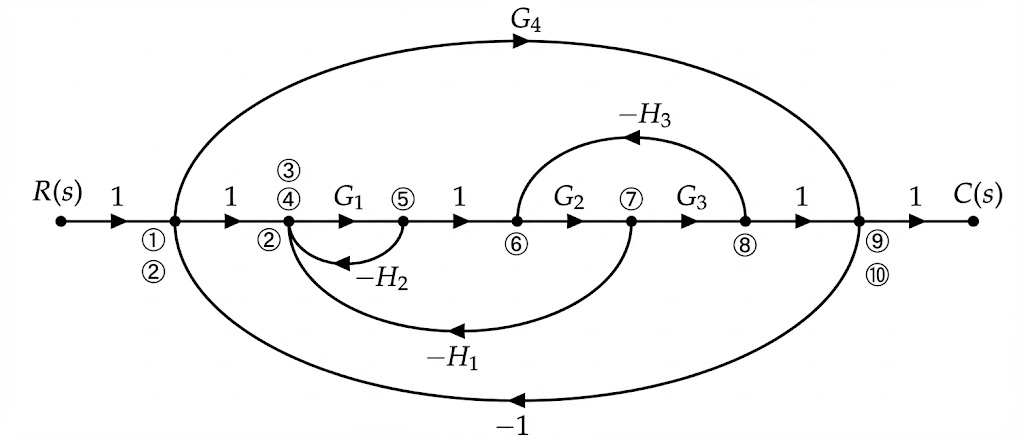
Có các vòng kín L1 = -G1H2, L2 = -G1G2H1, L3 = -G1G2G3, L4 = -G2G3H3, L5 = -G4. Xác định tích 2 vòng kín không dính nhau L1L4.
A. L1L4=-G1H2G2G3H3
B. L1L4=G1H2G1G2G3
C. L1L4=G1H2G2G3H3
D. L1L4=G1H2G4